Shiladitya BiswasI'm a Localization System Engineer at Xpeng in San Diego, where I am a part of the AI Globalization Team. My current responsibilities include developing perception-aware planning and advanced Sensor Fusion algorithms for Autonomous Parking. Prior to Xpeng, I worked at MHS Global (currently Fortna Inc.) as a Computer Vision Software engineer. Here, I developed RGB-D camera rigs and other image acquisition and processing softwares. I received my MS degree from UC San Diego, where I worked with Prof Nikolay Atanasov at the Existential Robotics Lab. I completed my Bachelors degree in Electronics and Communication Engineering from BIT Mesra. Email / CV / GitHub / Google Scholar / LinkedIn |

|
Research and ProjectsMy current research work at Xpeng is towards developing risk-aware planning and navigation algorthims for autonomous systems. This involves three key areas: 3D scene reconstruction, 3D scene understanding, and trustworthy decision-making. While the Deep learning community has advanced these fields significantly, their industrial adoption is limited by computational challenges and safety concerns due to blackbox nature of these algorithms. My work bridges these three areas by leveraging the capabilites of Deep learning while ensuring system safety guarantees by adopting concepts from Formal methods. Given below is a list of publications and projects that I have completed so far. Feel free to have a look and get in touch with any questions or suggestions. Enjoy! |
|
|
Matrix Multiply and Transpose LibraryIndependent Project 2021 video / code / website / A simple Matrix library to perform Matrix operations namely Matrix Multiplication (using Stressan’s Algorithm) and Transpose. |
|
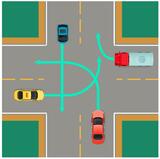
Multi-Agent Reinforcement Learning for Autonomous Driving.UC San Diego 2020 report / We applied the Multi-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm to a multi-agent reinforcement learning scenario involving a four-lane traffic intersection. The performance of MADDPG was compared with the Proximal Policy Optimization (PPO) algorithm to evaluate their effectiveness. To enhance the stability of MADDPG, we incorporated prioritized experience replay (PER) and conducted a detailed analysis of how factors such as batch size, multi-CPU training, and experience collection influence agent performance. We used CARLA for this project. This was a course project for ECE276C at UC San Diego. |
|
Infinite-Horizon Stochastic Optimal Control.UC San Diego 2020 report / Implemented and compared the performance of value and Policy iteration-based controller in terms of convergence time and state space resolution on an Inverted pendulum balancing controller in Python. Formulated a Markov Decision Process (MDP) for the system by defining a discreet state space over the angular velocity, angular postion and control input of the pendulum. A transtion matrix is built over the 3D state-space of the system by using Euler discretization for state propgation and brownian noise to model the uncertanities in the system. Finally, a cost function is defined over the state-space which is ultimately used to solve the infinite-horizon discounted optimal control problem, thereby generating the optimal control policies. This was a course project for ECE276B at UC San Diego, hence the code cannot me made public. |
|
Bio-Inspired RoboticsShiladitya Biswas, Saurabh Mirani, Joseph Bell, James Salem UC San Diego , 2020 report / code / Explored the design and control of a quasi-direct-drive legged robot, gaining hands-on experience in experimental robotics, mechanical design, and Python programming. Developed and implemented kinematic models, deriving forward and inverse kinematics for precise leg position control using Python, while executing PID and time-optimal motion strategies. Furthermore, I analyzed the impact of varying leg designs, including size, shape, series elasticity, and gearing, to assess their effects on performance and efficiency. This was a course project for MAE207 at UC San Diego. |
|
Motion Planning in 3D Space.UC San Diego 2020 report / Implemented and compared the performance of A* and Rapidly expanding Random Tree (RRT*) Algorithm in terms of planning time and path length on multiple 3D environments with obstacles in Python. This was a course project for ECE276B at UC San Diego, hence the code cannot me made public. |
|
Door-Key Problem.UC San Diego 2020 report / The goal here was to figure out a set of control policy that enables the robot (red triangle) to first fetch the key, open the door with the key and then reach the goal location. To achive this, I formulated the problem as a Markov Decision Process (MDP) in which each cell on the 2D grid has a reward associted to it. I then implemented Dynamic Programming to generate the optimum control policy. This was a course project for ECE276B at UC San Diego, hence the code cannot me made public. |
|
Visual Inertial SLAM.UC San Diego 2020 report / Implemented an Extended Kalman Filter based Visual-Inertial SLAM algorithm to track the three dimensional position and orientation of a Car. Used data from gyroscope, accelerometer, and camera measurements. Validated the algorithm on real world KITTI Dataset. This was a course project for ECE276A at UC San Diego, hence the code cannot me made public. |

|
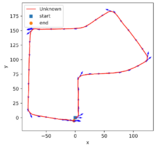
Particle Filter SLAM.UC San Diego 2020 report / Evaluated the Particle filter using real-world odometry data, indoor 2D laser scans, and RGBD measurements captured by THOR, a humanoid robot equipped with LiDAR and Kinect v2 sensors. The Particle filter successfully demonstrates its effectivity in capturing highly non-linear motion and measurement models. I used Sample Importance Sampling for resampling the particles inorder to address the particle depletion phenomenon. This was a course project for ECE276A at UC San Diego, hence the code cannot me made public. |

|
Stop Sign Detection.UC San Diego 2020 report / Implemented Gaussian Discriminant Analysis (GDA)- a supervised learning algorithm, to classifying Red pixles from non-red pixels, and thereby detected stop signs.This was a course project for ECE276A at UC San Diego, hence the code cannot me made public. |

|
Face Recognition using Principle Component AnalysisUC San Diego 2019 video / report / code / Applied Principal Component Analysis (PCA) to a collection of face images to generate a set of basis features. Projected face images onto a feature space (”face space”) optimized to encode the variation among known face images. Defined the face space using ’eigenfaces’, which are the eigenvectors derived from the set of faces and represent patterns of variation rather than isolated facial features like eyes, ears, or noses. |

|
[Unpublished] Synthesizing Unnatural Grasps in Humanoid Robots using Fuzzy LogicArun Dayal Udai, Shiladitya Biswas, Sree Aslesh Penisetty BIT Mesra International Journal of Humanoid Robotics, 2019 paper / We proposed a whole body prehensile grasping algorithm for Humanoid Robots. A fuzzy logic based algorithm was implemented to assign grasping weightage to the body parts, i.e. arms, torso, head, etc. of the robot depending upon the position of the target object. |
|
A Hardware-in-a-Loop Setup for Benchmarking Robot ControllersShiladitya Biswas, Arun Dayal Udai, Gaurav Kumar BIT Mesra International Conference on Computational Intelligence, 2018 arxiv / We proposed a Hardware-in-a-Loop simulation technique to test a live robot controller using a virtual model of the robot running on a standard computer. |

|
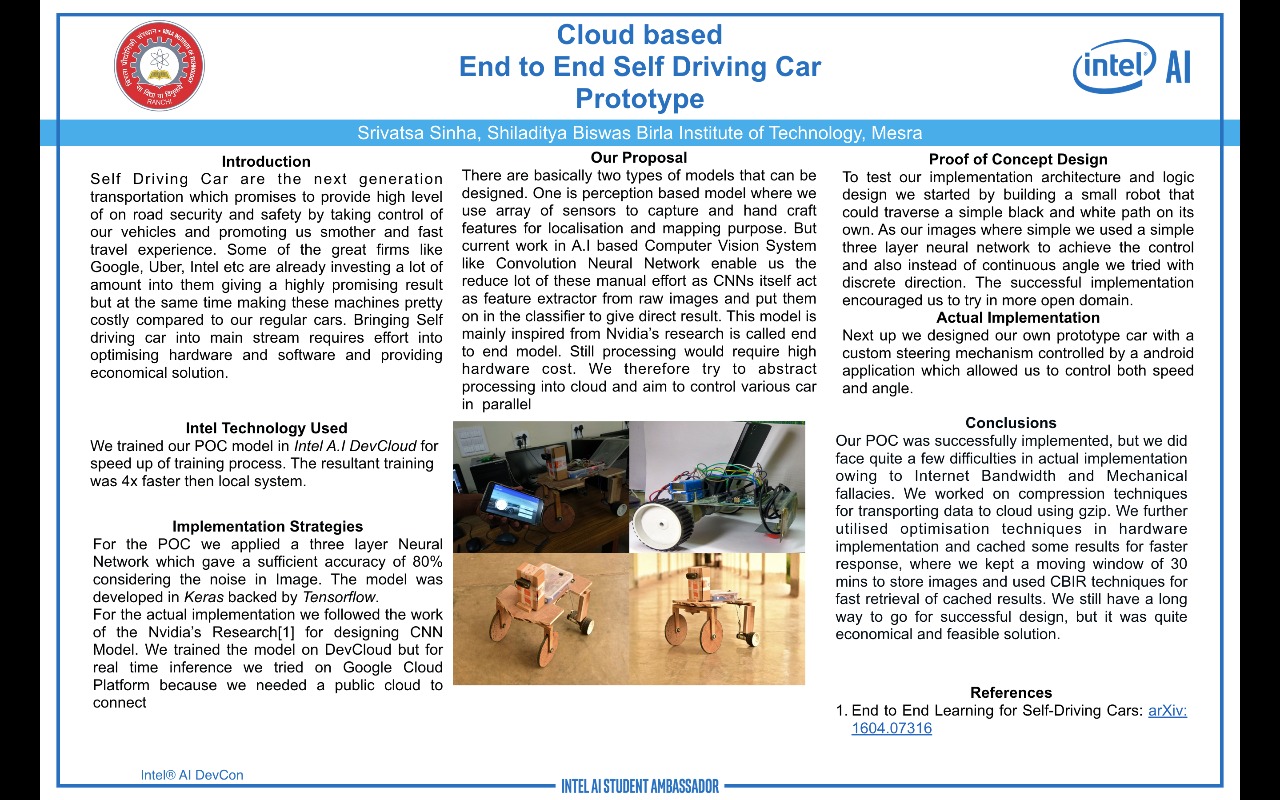
A Cloud based End to End Self Driving Car Prototype.Shiladitya Biswas, Srivatsa Sinha, Gajal Vasita BIT Mesra Intel AI DevCon, San Francisco, 2018 code / poster / We designed a cloud based end-to-end self-driving car prototype. This was presented at the Intel AI DevCon 2018 , San Francisco. |
|
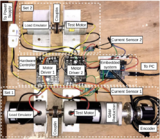
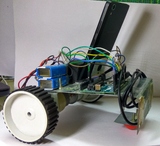
Self-Driven Autonomous Car – A pilot projectIndependent Project 2017 video / code / This project marked one of my earliest endeavors into creating a camera-based self-driving car. The car navigated autonomously by following a white path on a black background. A smartphone was utilized to transmit live video feeds to a laptop, where the images underwent pyramidal reduction processing and were subsequently fed into a neural network. The neural network’s output layer comprised of four nodes—Left, Right, Forward, and Backward—responsible for decision-making. These decisions were then relayed back to the car via Bluetooth and executed by an Arduino Uno board, enabling the vehicle to maneuver along the road. This project served as a proof of concept for my UG thesis project “A Cloud based End to End Self Driving Car Prototype”. The training dataset that was collected for this project can br found here. |
{kind=link}
Teaching |

|
CSE176E - Robotic System Design & ImplementationTeaching, UC San Diego 2021-01-06 website / Was a teaching assitant under Prof Steven Swanson at UC San Diego for the Winter 2021 quarter. |

|
CSE276A - Introduction to RoboticsTeaching, UC San Diego 2020-10-06 website / Was a teaching assitant under Prof Henrk Christensen at UC San Diego for the Fall 2020 quarter. |
|
Design and source code from Leonid Keselman's website. You can also directly use my template from github. Please replace the google analytics code in the default.html file. |